星取県宇宙ビジネスプランコンテストで月面におけるワイヤレス給電に関するビジネスアイデアを提案しました。私はプロトタイプの製作を担当しました。

星取県宇宙ビジネスプランコンテスト
鳥取県は美しい星空や鳥取砂丘での月面実証実験を活用して「星取県」という名前を掲げており、宇宙をテーマにしたビジネスプランコンテストが開催されました。 https://www.space-biz-tottori.com/より
https://www.space-biz-tottori.com/より
チーム「Lighthouse」
Lighthouseは、ビジネスサイドの阿部舞哉(あべま)とエンジニアの私がメンバーです。あべまは模擬人工衛星のCanSat開発、私はハイブリッドロケット開発のサークルに所属し、その縁でチームを結成しました。
月面でのワイヤレス給電
ビジネスプランは「月面にワイヤレス給電を用いたエネルギーインフラを構築する」という内容です。ワイヤレス給電機能を備えたエネルギー給電スタンドを設置し、ローバーや宇宙服などに電力を供給します。鳥取砂丘は月面によく似た環境であり、実証実験の場として最適です。
ワイヤレスのメリット
ワイヤレス給電により有線コネクタを排除することは、レゴリス対策・ロボットによる制御の観点からメリットがあります。
- 非常に細かく鋭利で、静電気や磁気を帯びた砂であるレゴリスの影響を受けない。
- コネクタ挿抜のために正確な位置制御を行う必要がなく、ロボットに簡単に電力を供給できる。
給電スタンドのメリット
ローバーの電力供給として、スタンドからの給電はランダー(着陸船)からの給電と太陽電池による自家発電の間をとったバランスの良い方法です。
| 探査範囲 | ローバーの設計 | |
|---|---|---|
| ランダー給電 | ❌ ランダー周辺のみ | ✅受電のみのシンプルな構成 |
| 太陽電池搭載 | ✅制限なし | ❌ 大きな発電装置が必要 |
| 給電スタンド | ✅スタンドを点在させ広範囲に | ✅ 無線の受電装置のみ |
ワイヤレス給電の方式
ワイヤレス給電には様々な方式があります。今回は最も単純な電磁誘導方式から試作しました。
| 効率 | 伝送距離 | 特徴 | |
|---|---|---|---|
| 電磁誘導 | 70%~90% | 数mm~数cm | Qi規格などで利用 |
| 磁界共振 | 40%~60% | 数cm~数m | モビリティ給電で注目 |
| マイクロ波 | 長距離ほど低下 | 数m~∞ | 長距離送電が可能 |
https://www.b-plus-kk.jp/wireless_1/wireless_2_1.htmlより
プロトタイプ製作
今回のコンテストは1/22に「ワイヤレス給電でなんかやろう」という状態でチームを結成し、実際のプロトタイプは3週間で開発しました。
スケジュール
ガントチャートに空白期間があるのは、鳥人間の電装と火星ローバーの電装作ったりスキー行ったりH3の打ち上げ(2/17の方)を見に行ったりしてるからです。ロケットがないだって?ゲホゲホ
リサーチ
まずは電磁誘導方式や磁界共振方式のワイヤレス給電を試すため、ファンクションジェネレータつきのオシロスコープでコイルとコンデンサを適当につけてちょっとした実験をしてみました。コイルにコンデンサをつけると振幅が大きくなるのは確認できましたが、現状のノウハウから短期間で長距離大電力の伝送を実装するのは難しそうだと判断しました。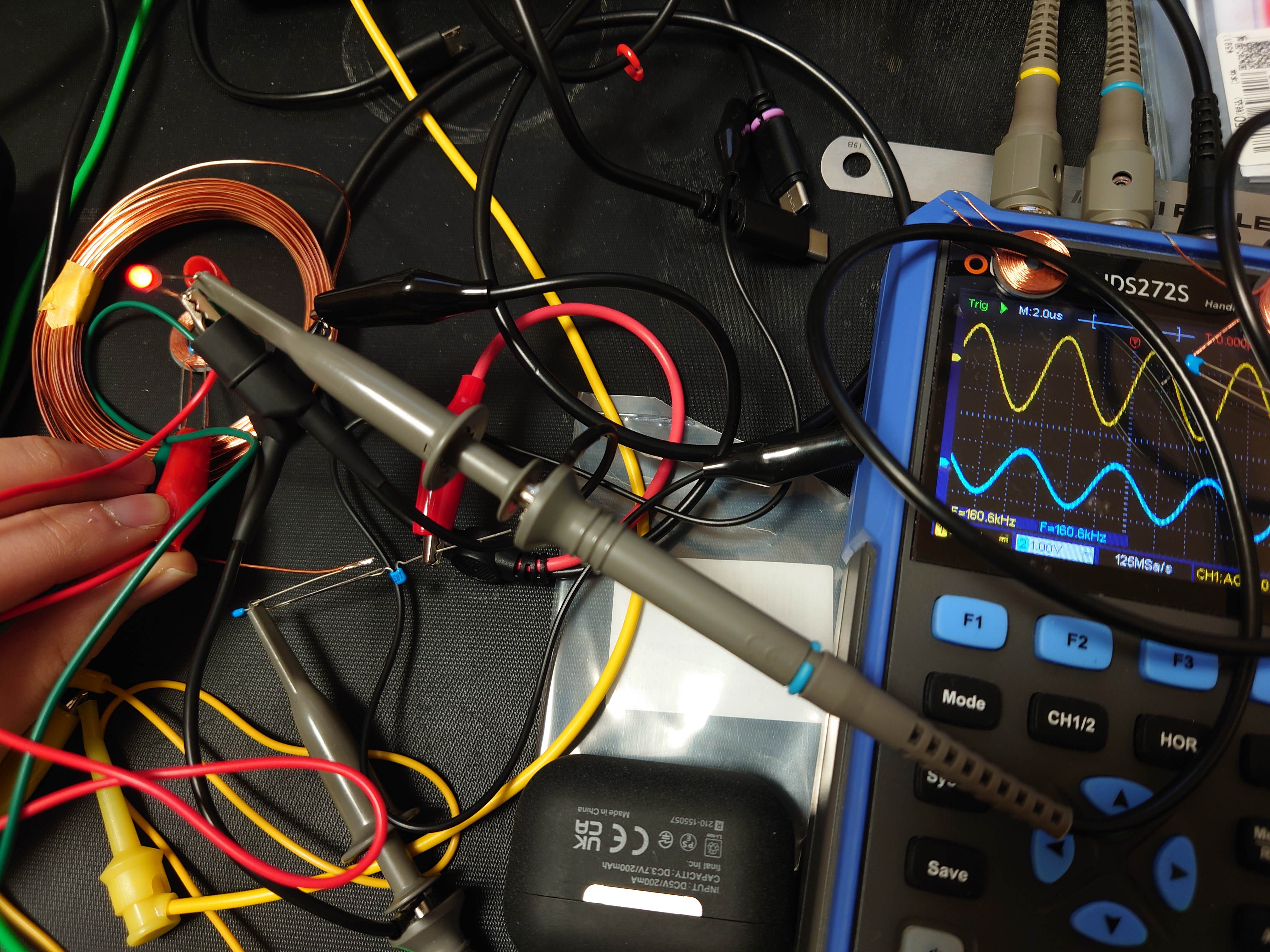
プロービングが雑なのは許して
試作で挫折しかけてた時にちょうどこのツイートを見て、スーパーキャパシタと工作用のソーラーモーターがあれば小電力のワイヤレス給電でもローバーが作れると気づきました。
スカイツリーから受信した電力でモーター回してみました https://t.co/CX08x9C5jA pic.twitter.com/mmO2LHuMYT
— しんいち💉💉💉💉 (@shinichi_8o2) February 4, 2023
ワイヤレス給電自体は、自作は一旦後回しにしてSeeed製のモジュールを使えることを確認しました。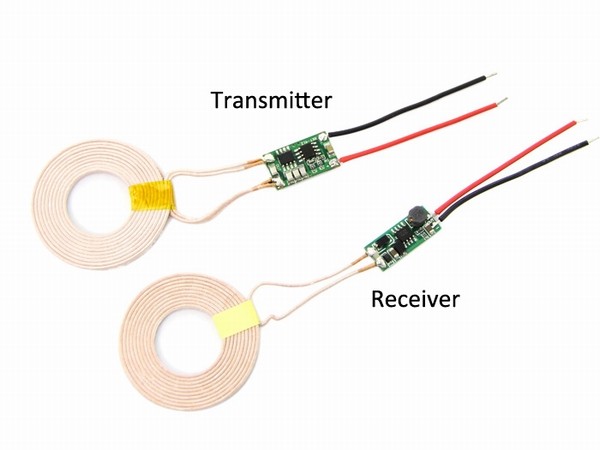
目標決定
ビジコンまでは月面で有用なワイヤレス給電技術を開発するのではなく
と割り切って目標を設定しました。
試作機
1号機
1号機では給電モジュールとスーパーキャパシタで走行できることを確認しました。
- スーパーキャパシタが強力で、15秒の充電で5分程度モーターを駆動できた
- 3.3vの昇降圧DCDCはトラブルなく動作した
- ソーラーカーのモーターとタイヤではスピードが早く操縦性に難がある
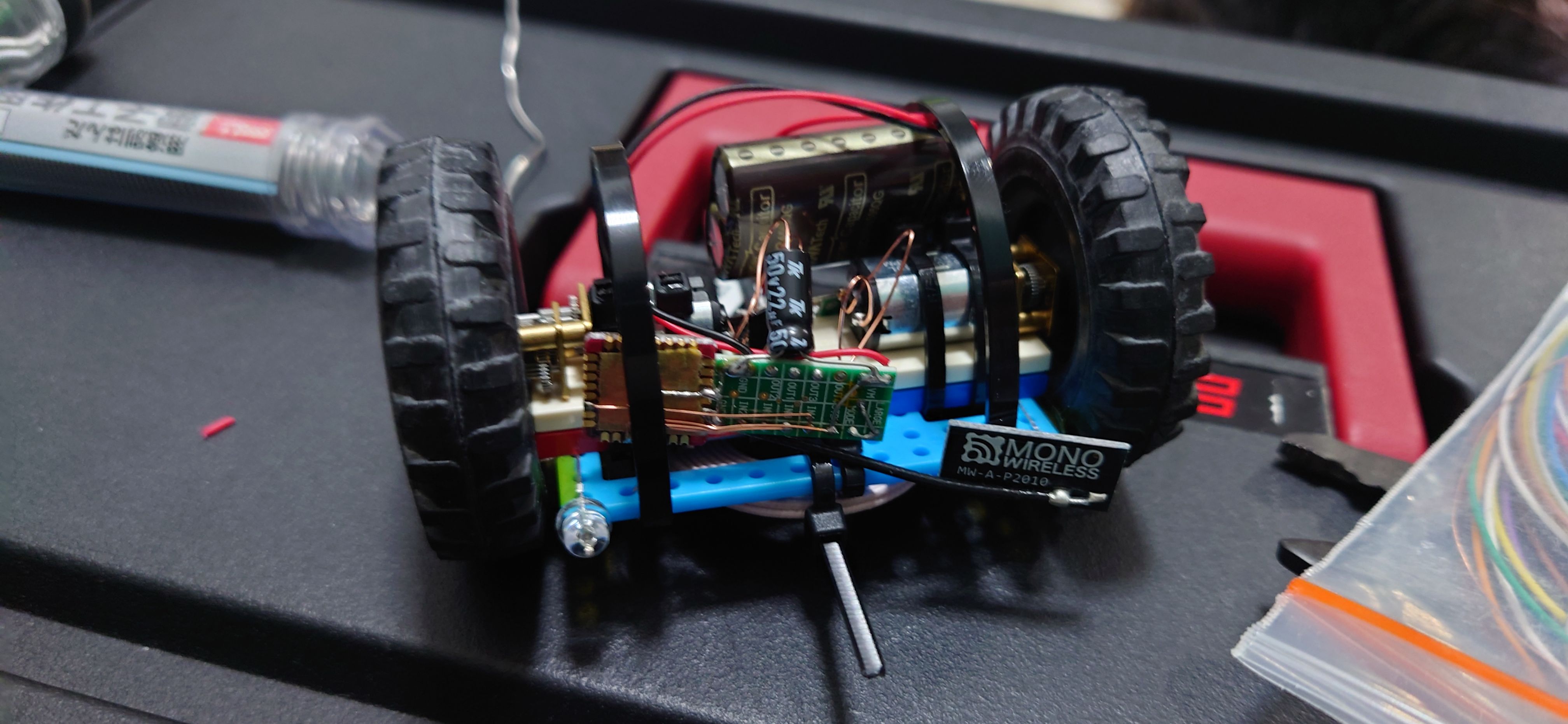
2号機
2号機ではTWELITEを使って操縦できることを確認しました。
- 片方のタイヤがスリップして走行できない
- 後転できないと不便だしチップトランジスタじゃなくて素直にモタドラ使ったほうがいい
- こっちのスーパーキャパシタは公称値に比べて全然電荷が貯まらない
3号機
3号機ではギヤードモータと大きめのタイヤで走行できることを確認しました。↓残ってた写真がこれだけでした。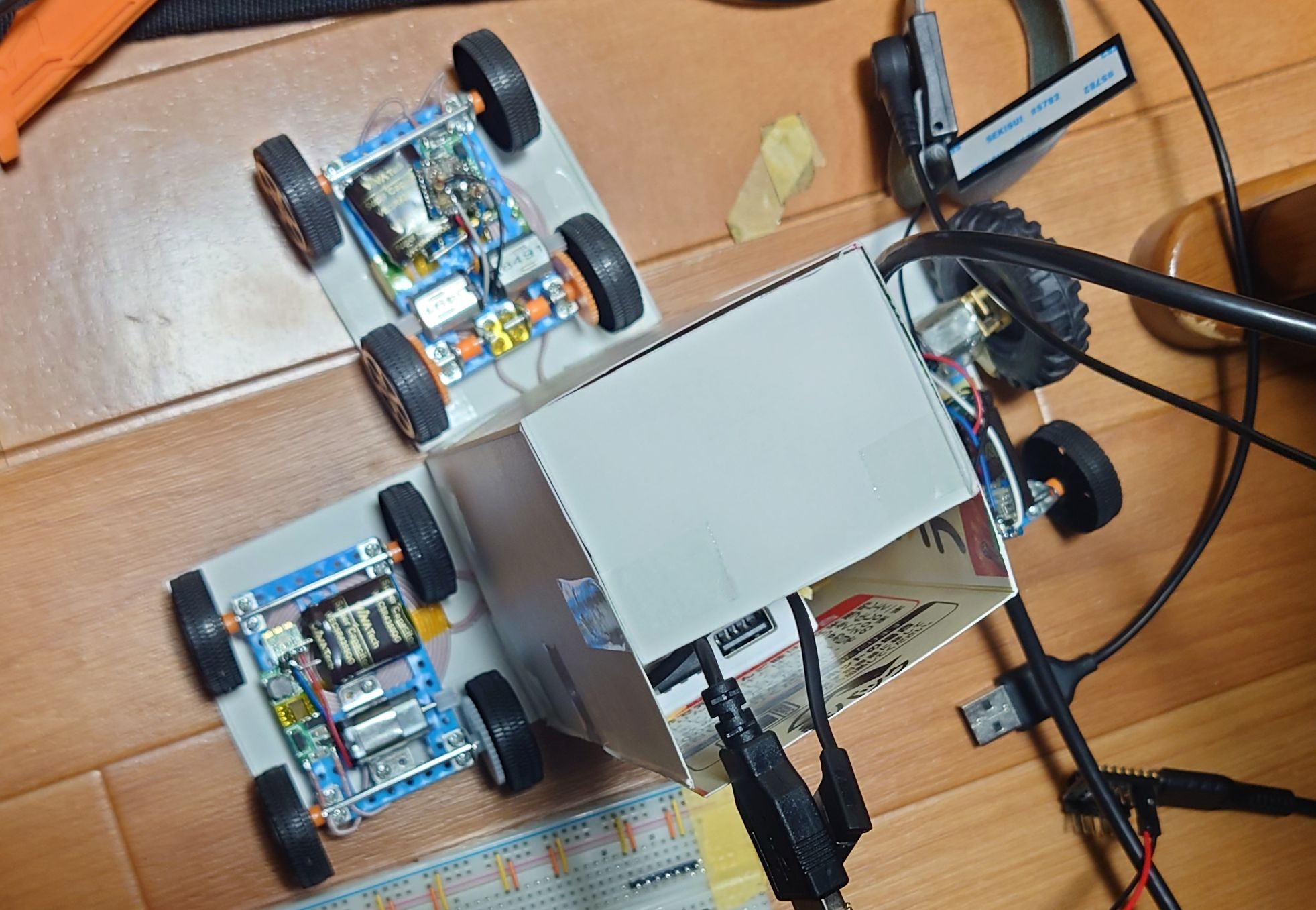
- ギヤ比1:50のギヤードモーターと50mm径のタイヤを3.3Vで回すとちょうど良い
- 軽すぎて発進時にウィリーになる
- タイヤ径が前後で違うとダサい。大きい4輪?クローラー?2輪?
- 手持ちのクローラーで試したら旋回時の抵抗が大きすぎたので2輪が最適そう(←当たり前)
完成品
ローバー
これにカプトンテープを貼って金のシートをかけてそれっぽい見た目にしました。TWELITEのアンテナはシートの中でも問題ありませんでした。
コントローラ
コントローラーはTWELITEのデジタル入力ピンに3ポジションのスイッチをそのまま接続して終わりのシンプルな構成です。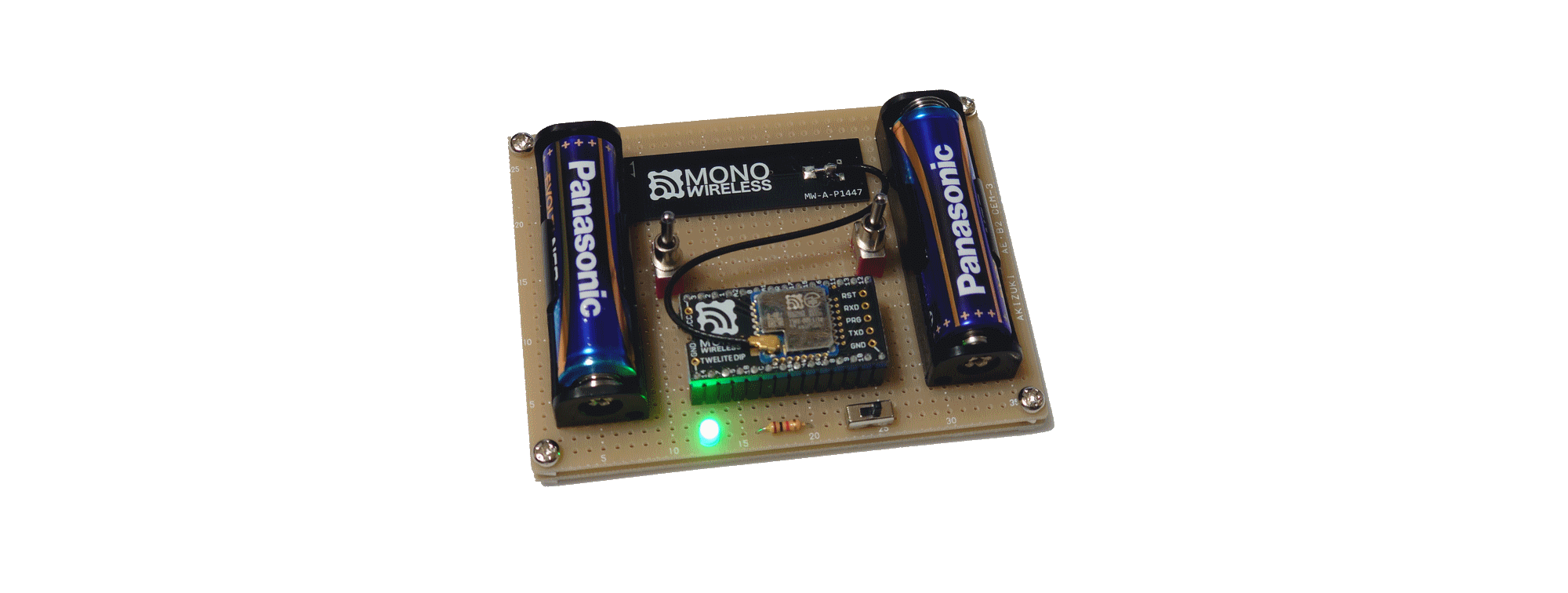
スタンド
3号機で示した通り中身はなんと牛乳パックです。シートを被せてソーラーパネルをつけるとそれっぽい見た目になりました。小電流でも自動でシャットダウンしないIoT機器対応 モバイルバッテリーを内蔵しています。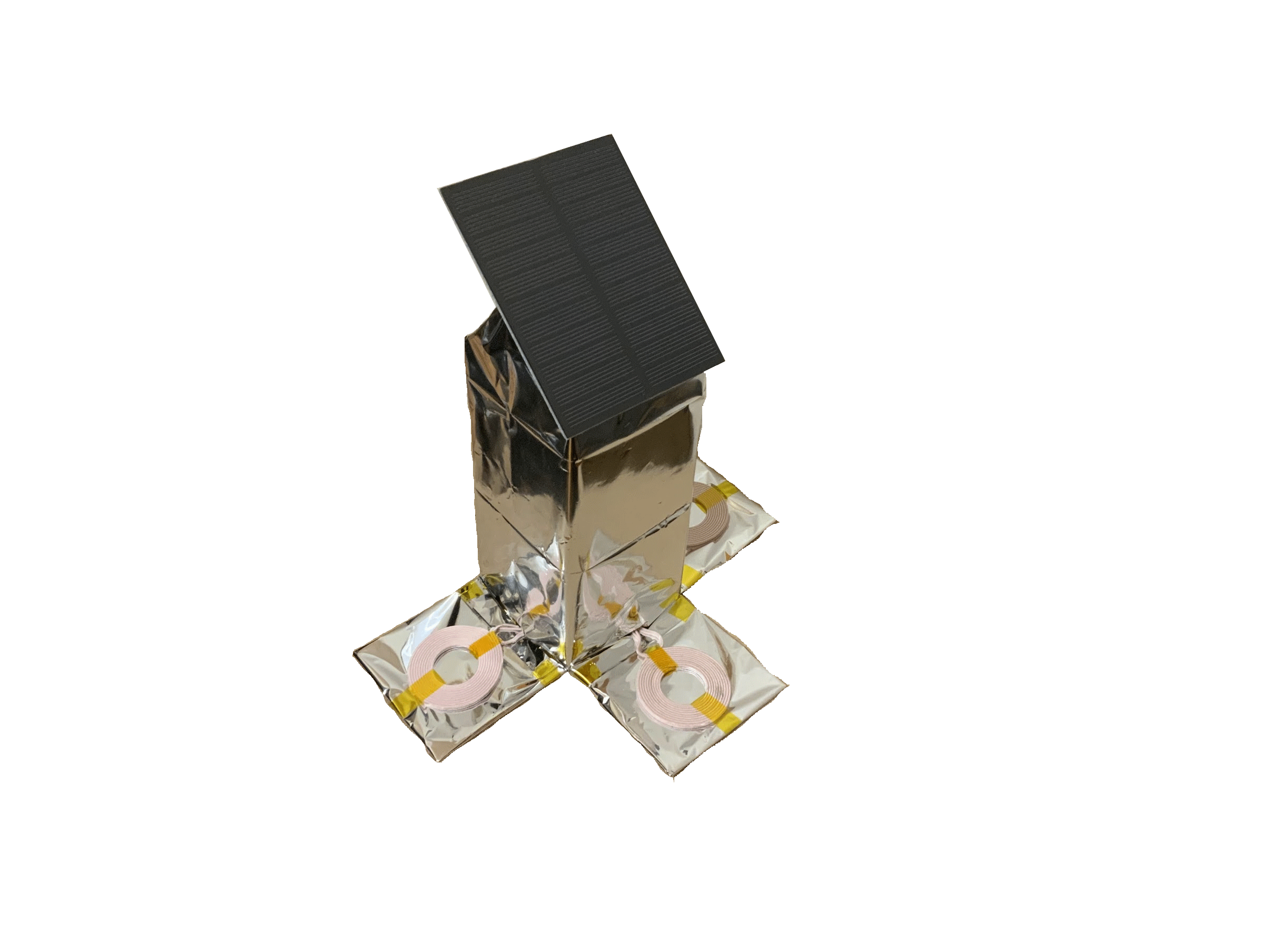
優勝!

あべまの圧倒的プレゼン力により優勝できました。鳥取に行く前に電電宮に行ったり直前までスライドを修正したりした甲斐がありました。(賞金は今回の開発費と旅費でだいたい飛びました…)
ワイヤレス給電を謳いながら今回はワイヤレス給電の開発をしたわけではないので、今後は地に足をつけて電磁気や電波関連を学んでいきたいです。